CIFAR10
Dans cette exemple nous utilisons le jeu de donnée de CIFAR10 (disponible à l’adresse suivante https://www.cs.toronto.edu/~kriz/cifar.html) pour apprendre a classer des images avec 10 types différents.
Présentation de CIFAR10
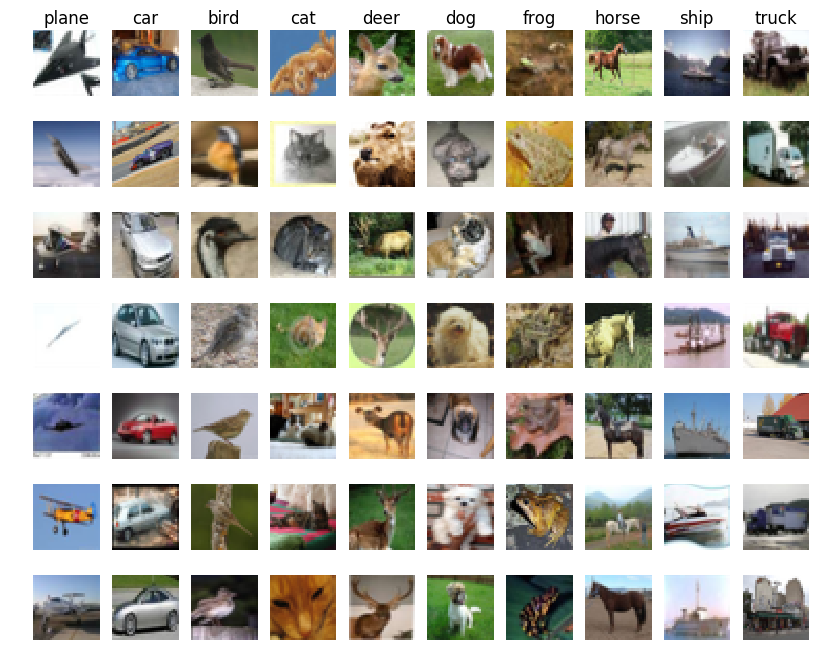
Cette base de données est composé 50 000 images pour faire l’apprentissage et 10000 images pour tester notre algorithme d’apprentissage, Les images sont réparties en 10 classes: Avion, voiture, oiseau,chat, cerf, chien, grenouille, cheval, bateau et camion
le jeu de donnée CIFAR a été developpé par l’université de Toronto et est un des jeu de données les plus utilisé en recherche en IA pour la reconnaissance d’objet. Il est utilisé surtout pour tester les capacités d’apprentissage des algorithmes d’apprentissage artificiel comme les réseaux de neurones. Il y a un autre jeu de donnée , CIFAR100, ou le but d’apprendre à reconnaitre 100 classes d’objet différents, dont dix classes de CIFAR10
Developpement
On utilise la librairie pytorch qui permet de créer des réseaux de neurones de manière optimisé et qui à déjà intégré l’ensemble des formules mathématiques qui permettent de créer un réseau de neurone et de faire son apprentissage. Nous utilisons la librairie torchvision également afin qu’on puisse envoyer les données dans le réseau de neurone.
Réseau de neurone convolutifs
Les réseaux de neurones prennent en entré un vecteur de variable qui sont des informations numériques des entiers, des décimal ( float)….
Une image est composé de pixel et chaque pixel est caractérisé par 3 variables, pour le systeme RGB ( rougle vert bleu) qui permet de creer les couleurs. Donc pour passer apprendre a classer des images d’objet il faut donner au réseau de neurone l’ensemble des pixels de l’image. Par exemple pour une image qui fait 64x64pixel, le réseau de neurone a 64x64x3 = 12288 variables en entrée. On a vu avec l’exemple de mnist que cela ne fonctionne pas très bien.
Depuis plusieurs années, il y a eu des recherches pour réduire le nombre de variable que l’on donne au réseau, a la place de donner des images bruts. D’abord parce que avec le nombre de variable en entré le réseau doit etre gigantesque et cela devient difficile a apprendre sur des ordinateurs normaux. Aussi parce que si l’image change legerement, si un pixel change, alors cela peut completement devenir d’apprendre un modele de réseau de neurone qui n’est pas capable de de prédire de nouvelle image.
Depuis quelques années des chercheurs on developpé des techniques innovantes qui permettent d’extraire automatiquement des informations des images et utilise des techniques permettant de filtrer les images pour extraire les contours des objets, les textures et les couleurs, et combine plusieurs filtre pour chaque filtre des poids sont appris pour permettre d’apprendre les meilleurs filtres qui permettent d’extraire des informations pertinente qui decrivent mieux nos images.
Pour extraire les informations, on regarde l’image par morceaux par exemple des morceaux de 5x5 pixels et pour chaque morceau on extrait les resultats des filtres
Plan de tests
Le jeu de donnée CIFAR 10 est constitué d’image qui sont décrites par des matrice de taille 32323: de sorte que chaque image est de taille 32*32 pixel et chaque pixel est codé sur 3 variable en RGB ( Rouge Vert Bleu).
Ici Nous avons les résulats de 4 tests:
- D’abord un premier réseau de neurone convolutif qui permet de gerer directement des images brut et permet d’extraire des variables et information à partir des images
- on fait le test avec seulement quelques epochs
- puis en utilisant un nombre d’epoch important
- Ensuite on teste un deuxième réseau de neurone convolutif avec plus de couche 19 couches qui vont d’abord extraire des informations des images et ensuite faire l’apprentissage.
- d’abord on test rapidement le réseau de neurone
- ensuite on test avec d’avantage d’epoch
from torchvision.datasets import CIFAR10
import numpy as np
import matplotlib.pyplot as plt
import torch
import torch.nn as nn
import torchvision.transforms as transforms
import torch.optim as optim
import torchvision.datasets as dsets
from torch.autograd import Variable
import torch.nn.functional as F
from sklearn.metrics import accuracy_score
CUDA = torch.cuda.is_available()
%matplotlib inline
# Un objet python pour appliquer des transormation sur les images
transformation = transforms.Compose([
transforms.ToTensor(), # on va convertir l'image en tenseur ( qui est une matrice à n dimension) de la taille 28x28x1
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)) # on normalise les couleurs entre 0 et 1
])
CLASSES = ('avion', 'voiture', 'oiseau', 'chat',
'cerf', 'chien', 'grenouille', 'cheval', 'bateau', 'camion')
# nombre d'image qui sont envoyé en meme temps dans le réseau
taille_batch=64
train_dataset = CIFAR10('./www/data/cifar10', train=False, download=True,
transform=transformation)
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=taille_batch, shuffle=True)
test_dataset = CIFAR10('./www/data/cifar10', train=False, download=True,
transform=transformation)
test_loader = torch.utils.data.DataLoader(test_dataset, batch_size=taille_batch, shuffle=True)
Downloading https://www.cs.toronto.edu/~kriz/cifar-10-python.tar.gz to ./www/data/cifar10/cifar-10-python.tar.gz
Files already downloaded and verified
Réseau de neurone convolutif simple
On utilise un réseau de neurone avec 2 couche de neurone convolutif et d’abord ** 20** filtres d’image et ensuite 30 filtre d’image. On applique les filtre pour des morceaux d’image de 5 x5x5 ** pixel. Comme on a des images en couleurs on en entré on a des pixel décrit par **3 varialbe
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
# 1ere couche de convolution
self.conv1 = nn.Conv2d(3, # nombre de variable par pixel
20,# nombre de filtre
kernel_size=5 # taille du morceau de l'image pour le calcul des filtres
)
self.batchnorm1 = nn.BatchNorm2d(20, affine=True) # permet de faire une moyenne des sortie de la couche
self.conv2 = nn.Conv2d(20, 30, kernel_size=5) # deuxieme couche de convolution
self.batchnorm2 = nn.BatchNorm2d(30, affine=True) # deuxleme couche de convolution
self.fc1 = nn.Linear(750, 100) #couche de reseau de neurone classique avec 750 neurone
self.fc2 = nn.Linear(100, 10) # couche de 100 neruone
def forward(self, x):
"""
Ici on applique la propagation
"""
x = self.conv1(x)
x = self.batchnorm1(x)
x = F.selu(F.max_pool2d(x,2))
x = F.selu(F.max_pool2d(self.batchnorm2(self.conv2(x)), 2))
#x = F.selu(F.max_pool2d(self.batchnorm3(self.conv3(x)), 2))
x = x.view(x.size(0),-1) # on applati la sortie des neurone convolutif
x = F.selu(self.fc1(x))
x = F.dropout(x, training=self.training) # dropout sert a ignorer des neurones pendant la propagation:
# les donnees ne passe pas dans ces neurone et a chaque nouvel epoch on change les neurones qui sont adapter
# ca sert a eviter de mal apprendre et ca reduit le temps de calcul
x = self.fc2(x)
# on renvoi le resultat de 10 variable qui correspond a chaque classe et pour chaque classe on a la probabilite
# d'appartenir a une classe
return F.log_softmax(x, dim=1)
def apprentissage(epochs=10):
model = Net()
if CUDA:
model = model.cuda()
model.train()
loss_fn = nn.NLLLoss()
optimizer = optim.Adagrad(model.parameters())
epoch_loss = []
epoch_accuracy = []
for epoch in range(epochs):
batch_loss = []
for batch_num, (data, targets) in enumerate(train_loader):
if CUDA:
data,targets = Variable(data).cuda(), Variable(targets).cuda()
else:
data, targets = Variable(data), Variable(targets)
optimizer.zero_grad()
output = model(data) #propagation
loss = loss_fn(output, targets)
loss.backward() # retropropagation
optimizer.step() # descente de gradient
batch_loss.append(loss.data[0])
epoch_loss.append(sum(batch_loss) / len(batch_loss))
accuracy = accuracy_score(targets.data.cpu().numpy(), output.data.cpu().numpy().argmax(axis=1))
epoch_accuracy.append(accuracy)
if epoch%5 == 0:
print('Epoch {}:\t erreur {:.4f}\tprecision {:.2%}'.format(epoch, epoch_loss[-1], accuracy))
return model, epoch_loss,epoch_accuracy
def test_model(model):
# Test le réseau de neurone sur les données test
print("Test le réseau sur des données test qui n'on jamais été observé par le réseau")
model.eval() # dans pytorch on met le model de reseau de neurone en mode evaluation pour ne garder que le reseau de neurone
# deja optimise et
for i,(data, targets) in enumerate(test_loader):# on parcours toute les donnees de test
if CUDA:
outputs = model(Variable(data).cuda())# on envoiles donnee sur le GPU si on en a un
else:
outputs = model(Variable(data).cpu())
# on garde que la variable de sortie qui a la plus grande probabilite
log_probs, output_classes = outputs.max(dim=1)
accuracy = accuracy_score(targets.cpu().numpy(), output_classes.data.cpu().numpy())
print('Accuracy: {:.2%}'.format(accuracy))
# on calcul la precision du modele
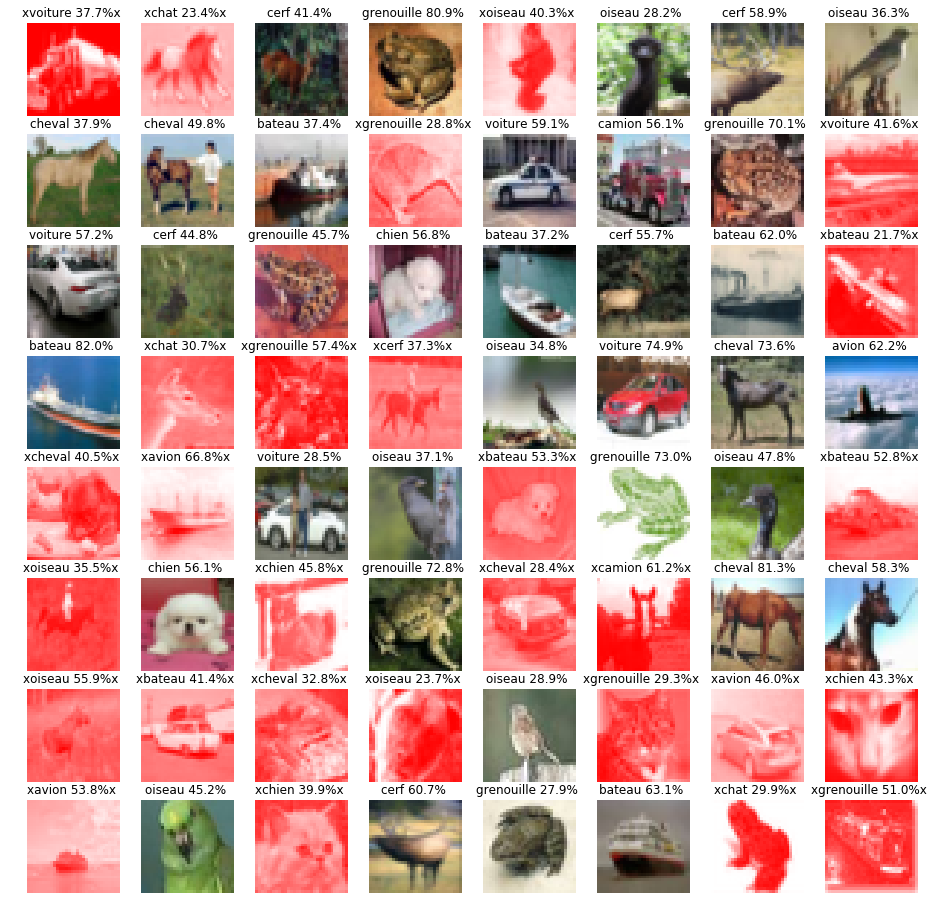
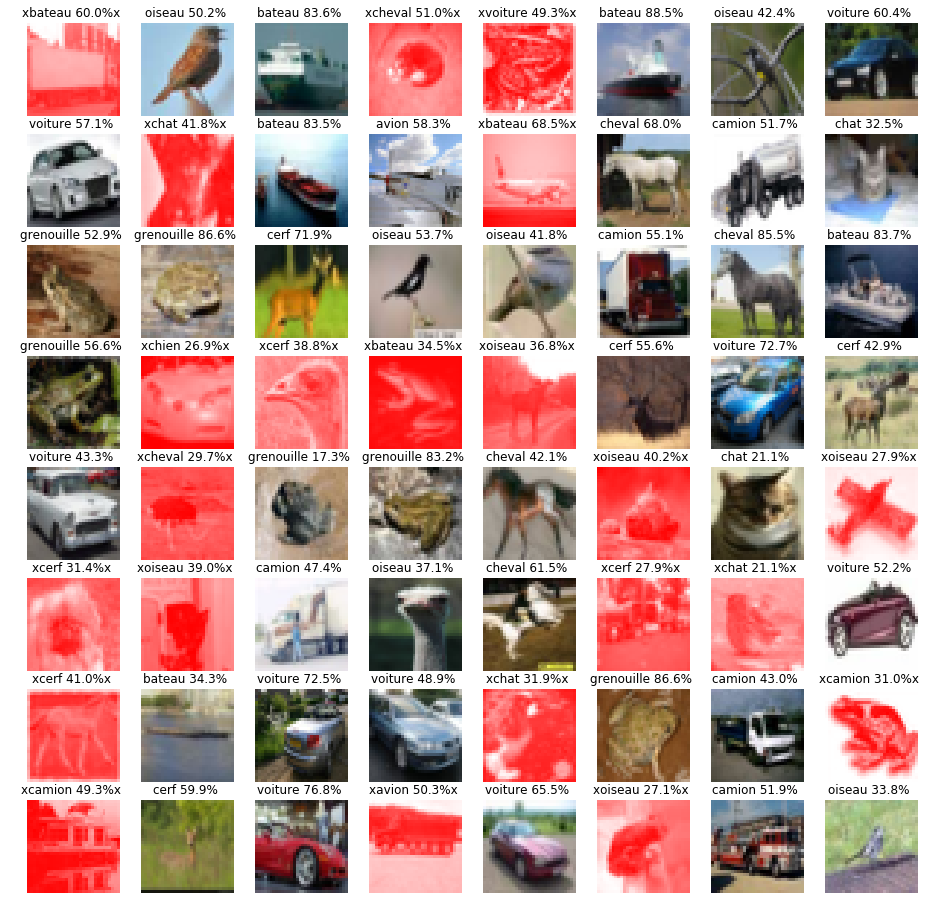
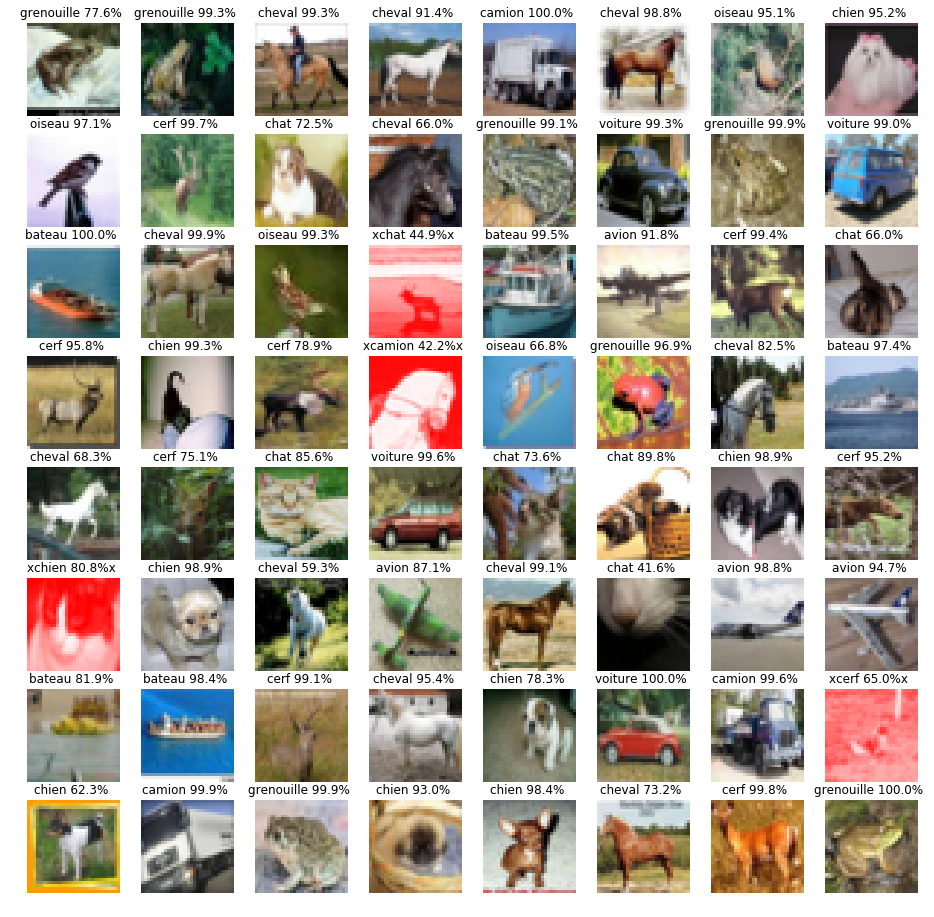
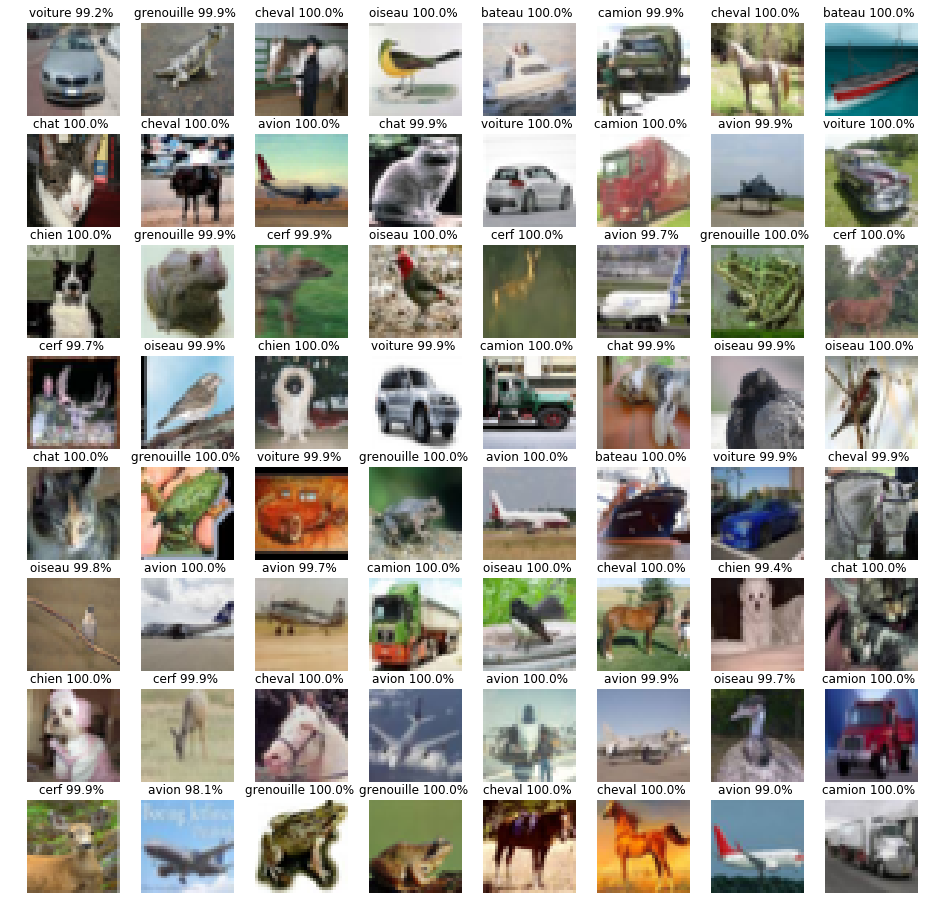
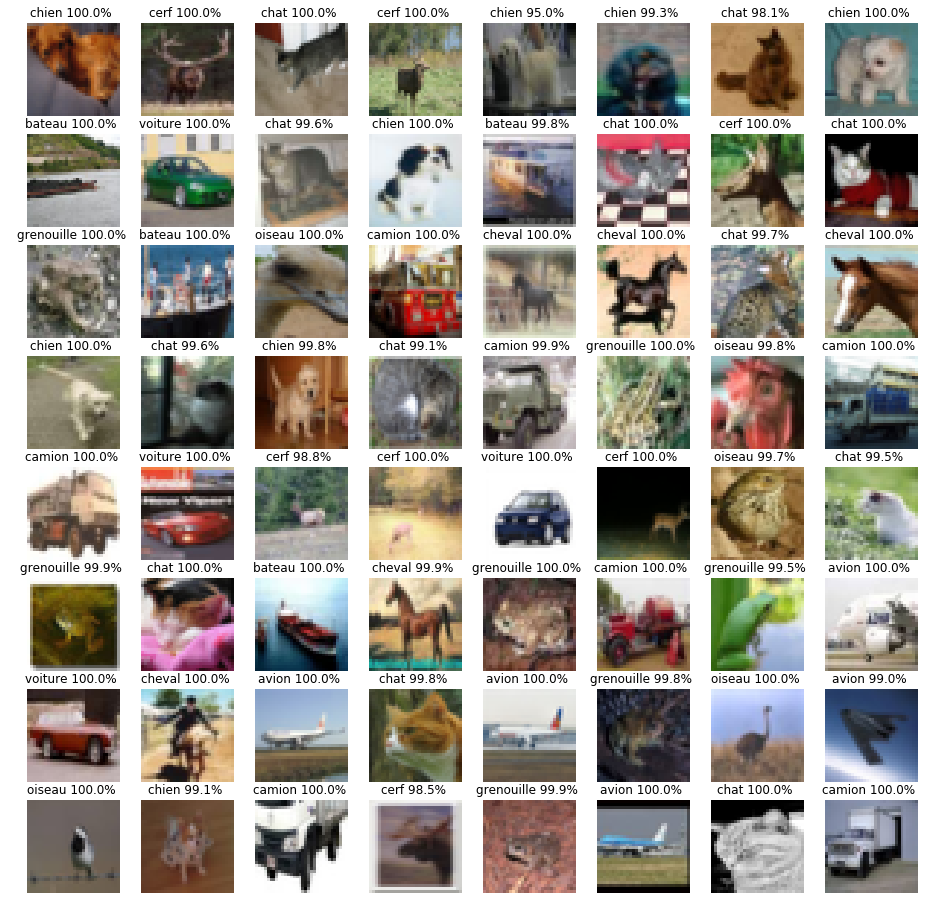
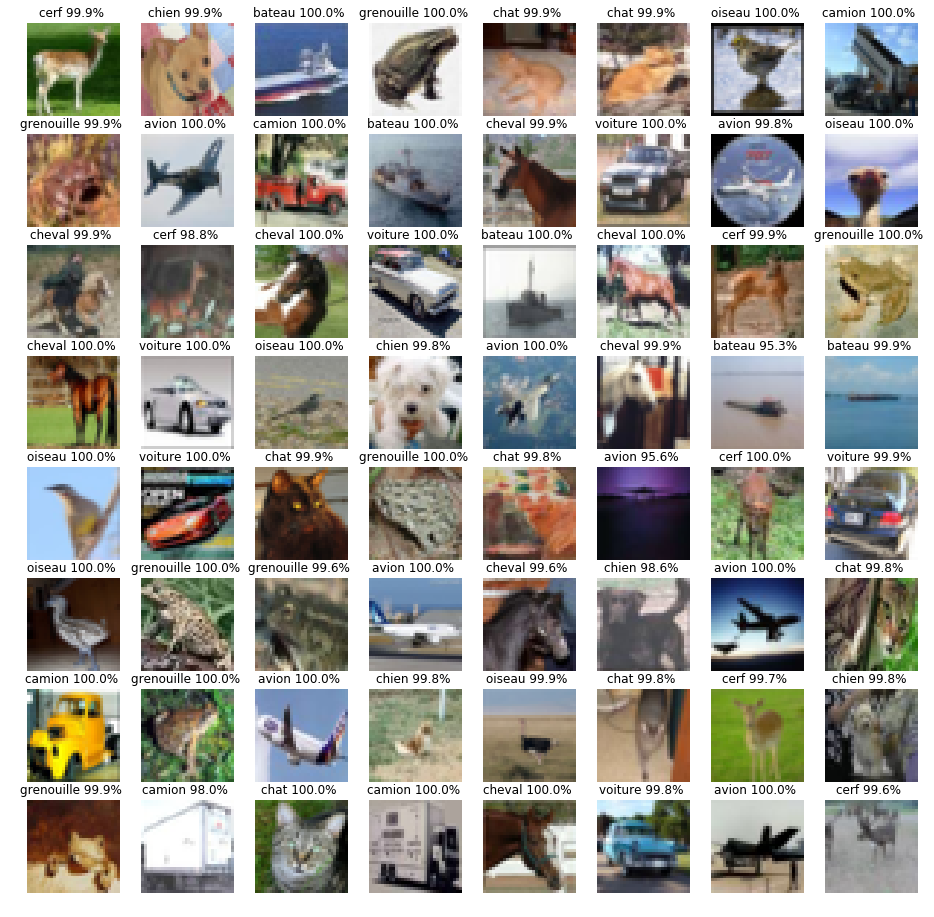
fig, axes = plt.subplots(8, 8, figsize=(16, 16))
# pour toute les images de test on va afficher l'image et la classe qu'il a predi et la probabilité
# si le réseau de neurone c'est trompe alors on affiche l'image en rouge
zip_these = axes.ravel(), log_probs.data.exp(), output_classes.data.cpu(), targets, data.cpu().numpy().squeeze()
for ax, prob, output_class, target, img in zip(*zip_these):
img = img / 2 + 0.5 # unnormalize
ax.axis('off')
if output_class == target:
ax.imshow(np.transpose(img, (1, 2, 0)) , cmap='gray' if output_class == target else 'autumn')
ax.set_title('{} {:.1%} '.format(CLASSES[output_class], prob))
else:
# comme un pixel est codé sur trois variable R G et B , on prend on met la variable R a 1
# cela va forder a ce que les image soit toute dans des couleurs de rouge ou des teintes de rouge
img[0,:,:]=1
ax.imshow(np.transpose(img, (1, 2, 0)) , cmap='gray' if output_class == target else 'autumn')
ax.set_title(r'x{} {:.1%}x '.format(CLASSES[output_class], prob))
plt.show()
if i>=5:
break
model, epoch_loss,epoch_accuracy = apprentissage(epochs=3)
fig,axes = plt.subplots(1,2, figsize=(16,4))
axes = axes.ravel()
axes[0].plot(epoch_loss)
axes[0].set_xlabel('Epoch')
axes[0].set_title('Erreur')
axes[0].set_ylabel('valeur')
axes[1].plot(epoch_accuracy)
axes[1].set_xlabel('Epoch')
axes[1].set_title('Erreur')
axes[1].set_ylabel('valeur')
plt.show()
test_model(model=model)
Test le réseau sur des données test qui n'on jamais été observé par le réseau
Accuracy: 56.25%
Accuracy: 51.56%
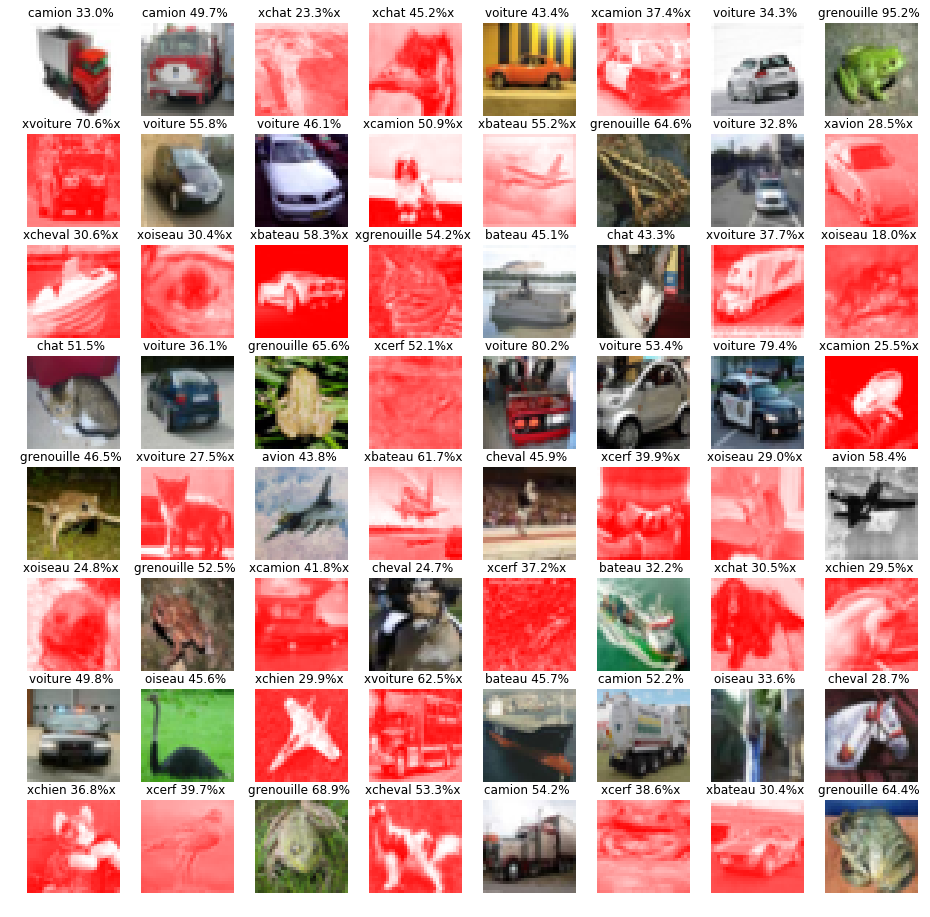
Accuracy: 51.56%
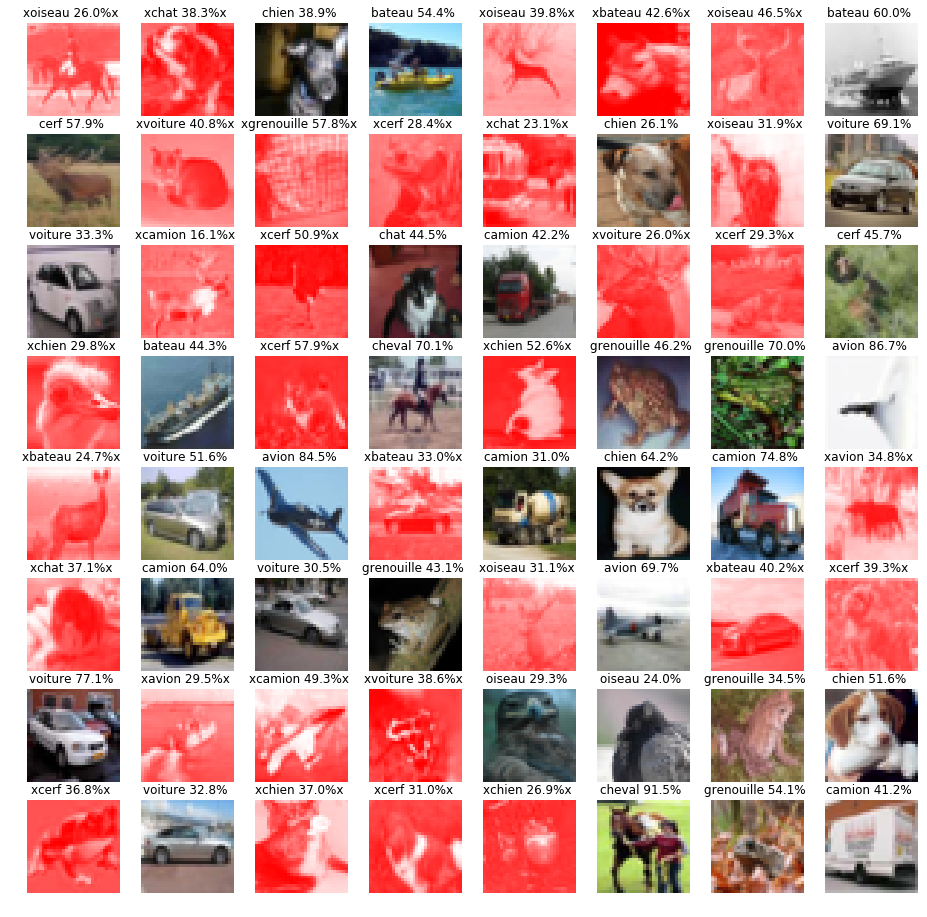
Accuracy: 56.25%
Accuracy: 39.06%
Accuracy: 65.62%
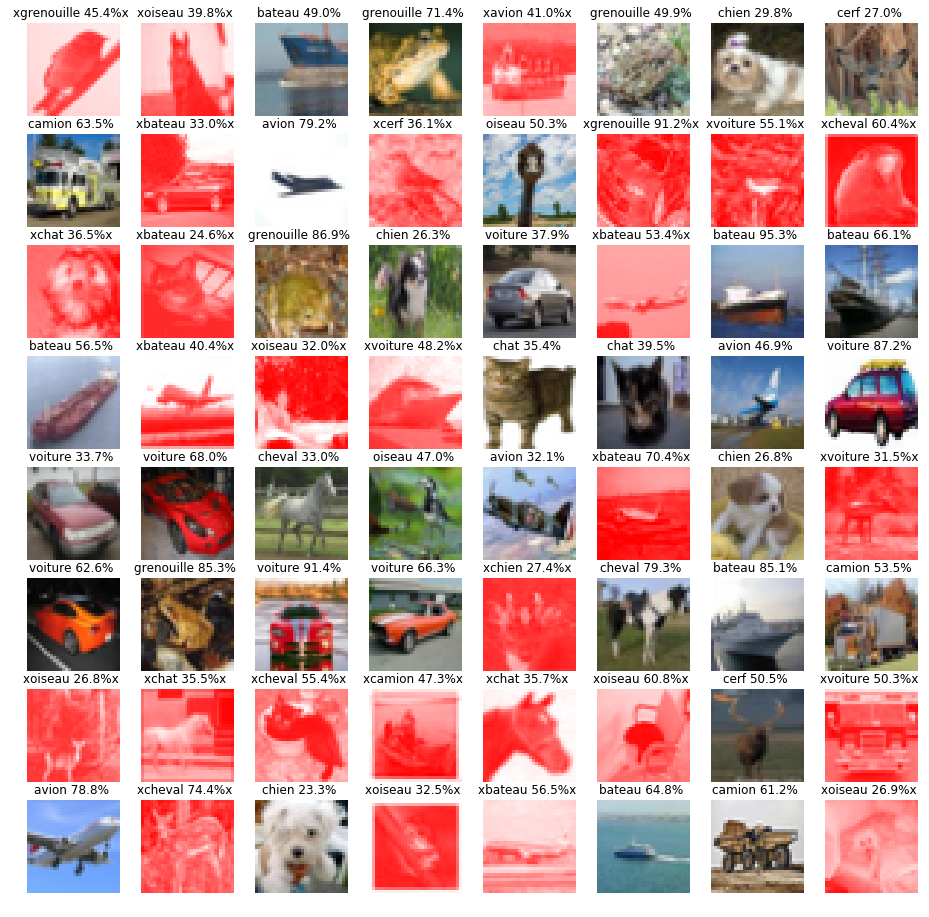
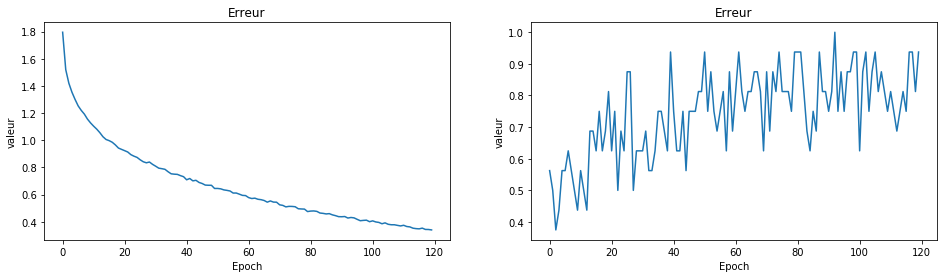
model, epoch_loss,epoch_accuracy = apprentissage(epochs=120)
fig,axes = plt.subplots(1,2, figsize=(16,4))
axes = axes.ravel()
axes[0].plot(epoch_loss)
axes[0].set_xlabel('Epoch')
axes[0].set_title('Erreur')
axes[0].set_ylabel('valeur')
/home/zakari/anaconda2/lib/python2.7/site-packages/ipykernel_launcher.py:23: UserWarning: invalid index of a 0-dim tensor. This will be an error in PyTorch 0.5. Use tensor.item() to convert a 0-dim tensor to a Python number
Epoch 0: erreur 1.7954 precision 56.25%
Epoch 5: erreur 1.2533 precision 56.25%
Epoch 10: erreur 1.1037 precision 56.25%
Epoch 15: erreur 0.9972 precision 62.50%
Epoch 20: erreur 0.9234 precision 62.50%
Epoch 25: erreur 0.8563 precision 87.50%
Epoch 30: erreur 0.8091 precision 62.50%
Epoch 35: erreur 0.7531 precision 75.00%
Epoch 40: erreur 0.7089 precision 75.00%
Epoch 45: erreur 0.6816 precision 75.00%
Epoch 50: erreur 0.6452 precision 93.75%
Epoch 55: erreur 0.6113 precision 75.00%
Epoch 60: erreur 0.5778 precision 81.25%
Epoch 65: erreur 0.5564 precision 81.25%
Epoch 70: erreur 0.5247 precision 87.50%
Epoch 75: erreur 0.5106 precision 81.25%
Epoch 80: erreur 0.4786 precision 93.75%
Epoch 85: erreur 0.4575 precision 75.00%
Epoch 90: erreur 0.4369 precision 75.00%
Epoch 95: erreur 0.4178 precision 75.00%
Epoch 100: erreur 0.4065 precision 62.50%
Epoch 105: erreur 0.3813 precision 93.75%
Epoch 110: erreur 0.3740 precision 81.25%
Epoch 115: erreur 0.3478 precision 75.00%
Test le réseau sur des données test qui n'on jamais été observé par le réseau
Accuracy: 98.44%
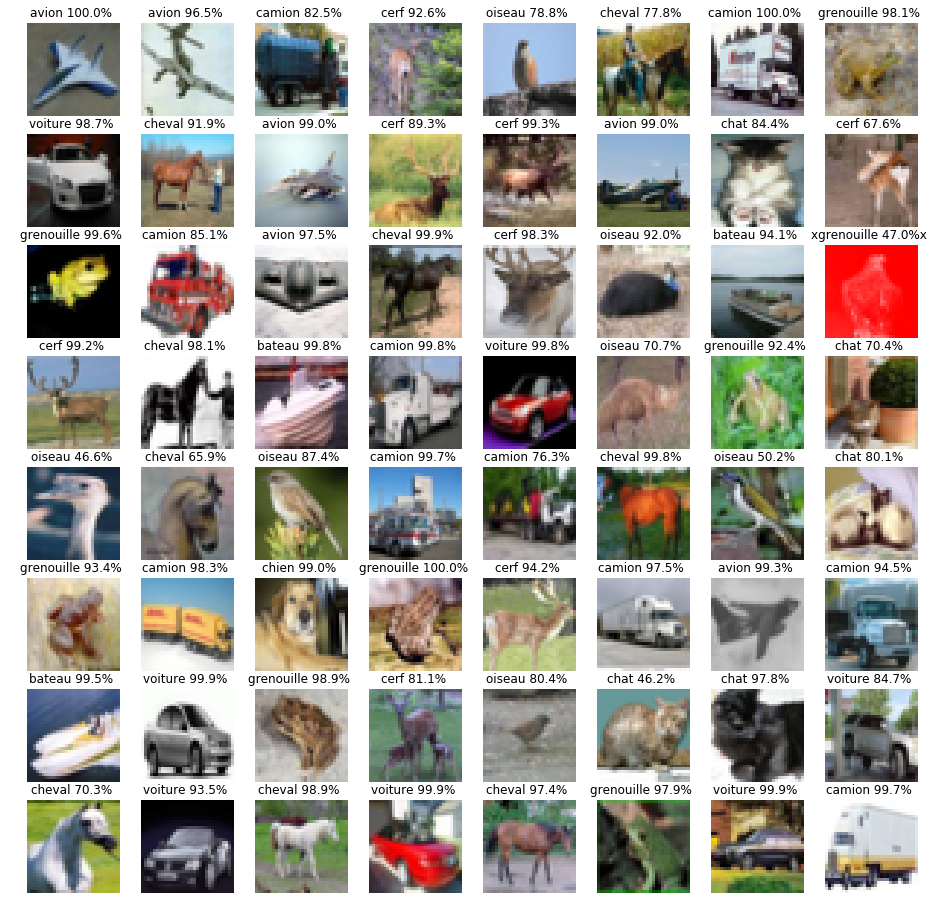
Accuracy: 98.44%
Accuracy: 93.75%
Accuracy: 95.31%
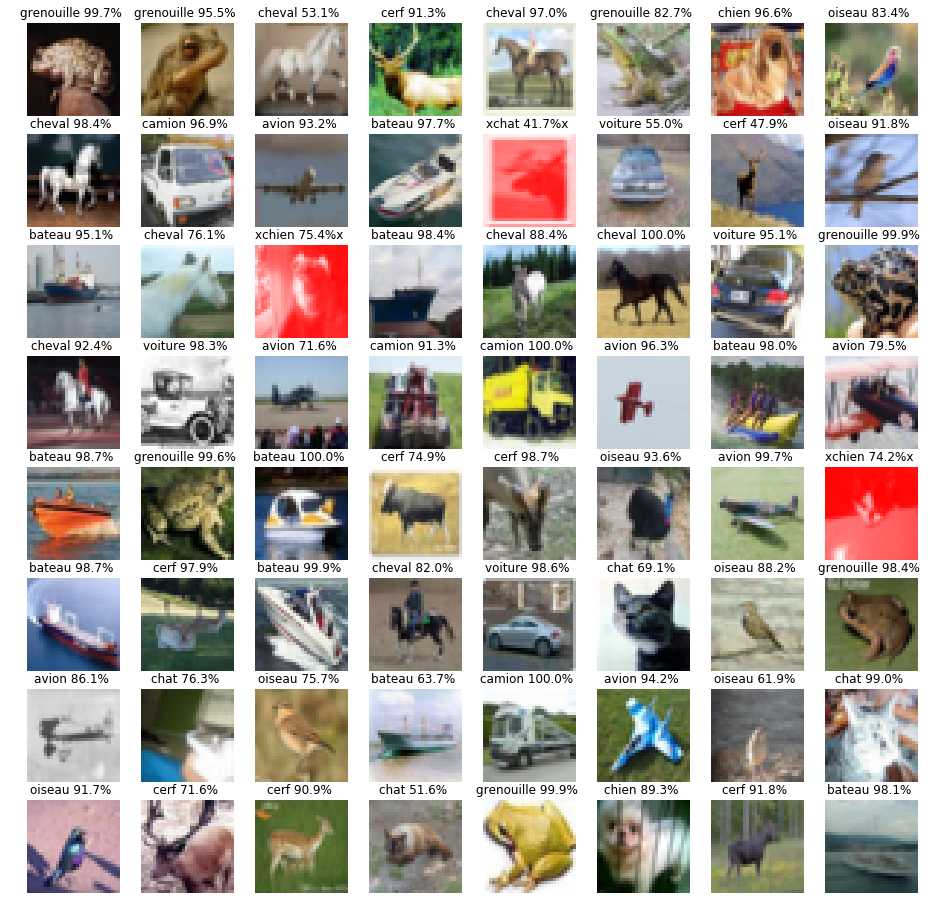
Accuracy: 85.94%
Accuracy: 93.75%
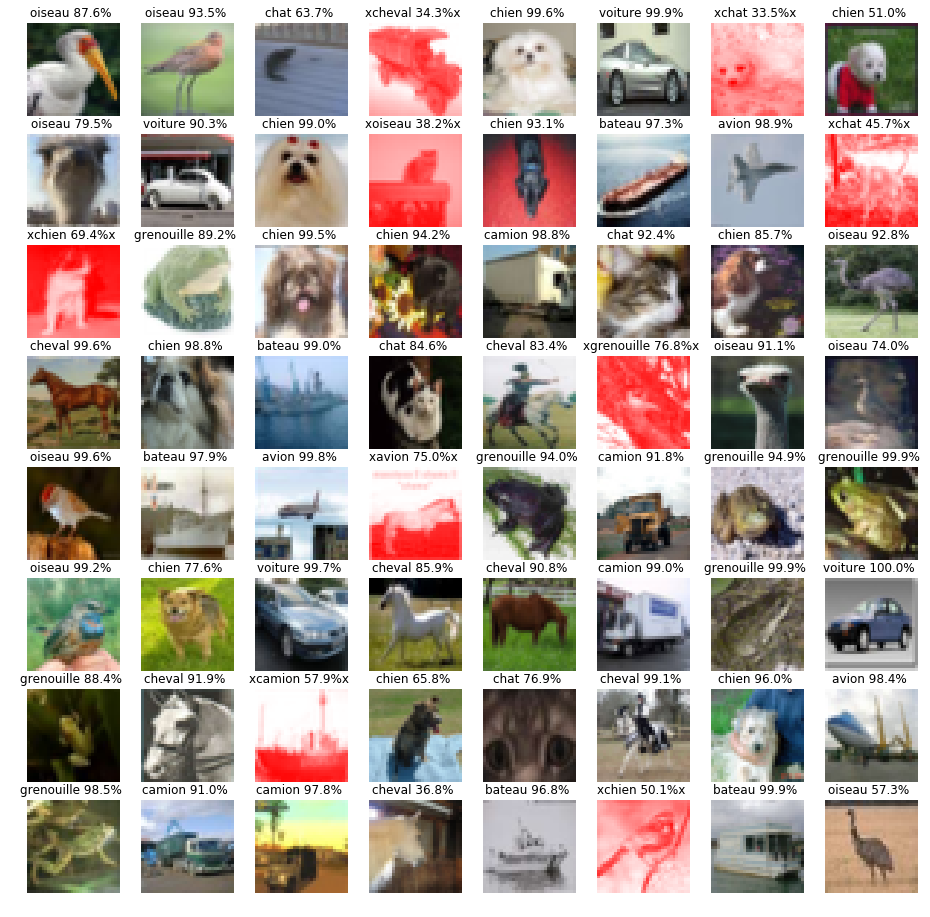
class VGG(nn.Module):
def __init__(self, vgg_name):
super(VGG, self).__init__()
cfg = {
'VGG11': [64, 'M', 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
'VGG13': [64, 64, 'M', 128, 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
'VGG16': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 'M', 512, 512, 512, 'M', 512, 512, 512, 'M'],
'VGG19': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 256, 'M', 512, 512, 512, 512, 'M', 512, 512, 512, 512, 'M'],
}
self.features = self._make_layers(cfg[vgg_name])
self.classifier = nn.Linear(512, 10)
def forward(self, x):
out = self.features(x) # on extrait les info pour chaque image en fonctions
#des couches qui ont été defini dans la fonction make layer
out = out.view(out.size(0), -1)
# on applique des couches de neurones classique avec 512 neurones et une fonction d'activation SELU
out = self.classifier(out)
out = nn.SELU(out)
# en sortie il y a 10 neurones pour chaque neurone on applique une fonction d'activation
return nn.LogSoftmax(out)
def _make_layers(self, cfg):
layers = []
in_channels = 3
for x in cfg: # on parcours le tableau qui correspond a le nombre de neurone par couche
if x == 'M':
# si dans la list on a un M alors on divise on reduit la taille de l'image par 2
layers += [nn.MaxPool2d(kernel_size=2, stride=2)]
else:
# sinon on creer une nouvelle couche en fonction du nombre de neurone qui est défini dans le tableau cfg
layers += [nn.Conv2d(in_channels, x, kernel_size=3, padding=1),
nn.BatchNorm2d(x),
nn.SELU(inplace=True)]
# chaque couche correspond a une couche de convolution avec x neurones
# et une couche de batch qui normalisze les valeurs entre les neurones
# et c'est suivi par l'utilisation d'une fonction d'activation SELU
in_channels = x
# on a ajoute une couche qui fait la moyenne des neurones
layers += [nn.AvgPool2d(kernel_size=1, stride=1)]
# on retourne l'ensemble des couches qui vont calculer les informations pertinente d'une image
return nn.Sequential(*layers)
def apprentissage(model, epochs=10):
if CUDA:
model = model.cuda()
model.train()
loss_fn = nn.NLLLoss() # la fonction d'erreur est modifie ce n'est pas prediction - y mais une fonction qui prend
# en compte 10 sortie
optimizer = optim.Adagrad(model.parameters()) # on utilise une version differente de la descente de gradient
# Adagrad est un algorithme de descente de gradient qui est améliore la descente gradient en evitant de tomber
#assurant de reduire au maximum l'erreur
epoch_loss = [] # on va stocker l'erreur moyenne a chaque epoch
epoch_accuracy = []#on va stocker la precision moyenne a chaque epoch
for epoch in range(epochs):
batch_loss = [] # on stock l'erreur par batch
for batch_num, (data, targets) in enumerate(train_loader):
if CUDA:
data,targets = Variable(data).cuda(), Variable(targets).cuda() # ici on passe ici seulement si on peut
# lancer le code dans la carte graphique
# sinon on passe
else:
data, targets = Variable(data), Variable(targets)
# on fait la propagation des donnees dans le reseau
optimizer.zero_grad()
output = model(data) #propagation
# on calcul l'erreur de toutes les images dans le batch
loss = loss_fn(output, targets)
# on fait la retropropagation des donnees
loss.backward() # retropropagation
# on optimize les poids de tout le reseau de neurone en fait une descente de gradient avec ADAgrad
optimizer.step() # descente de gradient
batch_loss.append(loss.data[0]) # on ajoute dans la liste l'erreur du batch
epoch_loss.append(sum(batch_loss) / len(batch_loss))# on ajoute l'erreur moyenne
#on calcule la precision du modele
accuracy = accuracy_score(targets.data.cpu().numpy(), output.data.cpu().numpy().argmax(axis=1))
#on ajoute la precision dans la liste
epoch_accuracy.append(accuracy)
# on affiche toute les 5 epochs les statistiques
if epoch%5 == 0:
print('Epoch {}:\t erreur {:.4f}\tprecision {:.2%}'.format(epoch, epoch_loss[-1], accuracy))
return model, epoch_loss,epoch_accuracy
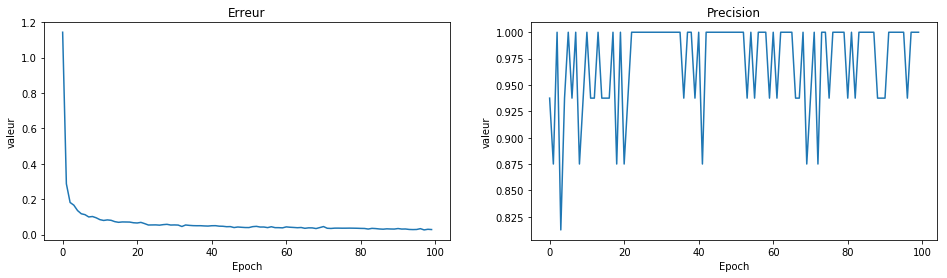
model_vgg = VGG(vgg_name='VGG19') # on initialise le reseau de neurone
model, epoch_loss,epoch_accuracy = apprentissage(model=model, epochs=100) # on lance l'apprentissage et on reccupere
# les liste d'erreurs et precision pour les afficher, le modele de reseau de neurone qui est appris sera utilise ensuite
fig,axes = plt.subplots(1,2, figsize=(16,4))
axes = axes.ravel()
axes[0].plot(epoch_loss)
axes[0].set_xlabel('Epoch')
axes[0].set_title('Erreur')
axes[0].set_ylabel('valeur')
axes[1].plot(epoch_accuracy)
axes[1].set_xlabel('Epoch')
axes[1].set_title('Precision')
axes[1].set_ylabel('valeur')
plt.show()
/home/zakari/anaconda2/lib/python2.7/site-packages/ipykernel_launcher.py:75: UserWarning: invalid index of a 0-dim tensor. This will be an error in PyTorch 0.5. Use tensor.item() to convert a 0-dim tensor to a Python number
Epoch 0: erreur 1.1433 precision 93.75%
Epoch 5: erreur 0.1177 precision 100.00%
Epoch 10: erreur 0.0844 precision 100.00%
Epoch 15: erreur 0.0693 precision 93.75%
Epoch 20: erreur 0.0655 precision 87.50%
Epoch 25: erreur 0.0548 precision 100.00%
Epoch 30: erreur 0.0545 precision 100.00%
Epoch 35: erreur 0.0506 precision 100.00%
Epoch 40: erreur 0.0500 precision 100.00%
Epoch 45: erreur 0.0451 precision 100.00%
Epoch 50: erreur 0.0397 precision 100.00%
Epoch 55: erreur 0.0394 precision 93.75%
Epoch 60: erreur 0.0435 precision 100.00%
Epoch 65: erreur 0.0354 precision 100.00%
Epoch 70: erreur 0.0453 precision 93.75%
Epoch 75: erreur 0.0361 precision 93.75%
Epoch 80: erreur 0.0350 precision 93.75%
Epoch 85: erreur 0.0317 precision 100.00%
Epoch 90: erreur 0.0342 precision 93.75%
Epoch 95: erreur 0.0288 precision 100.00%
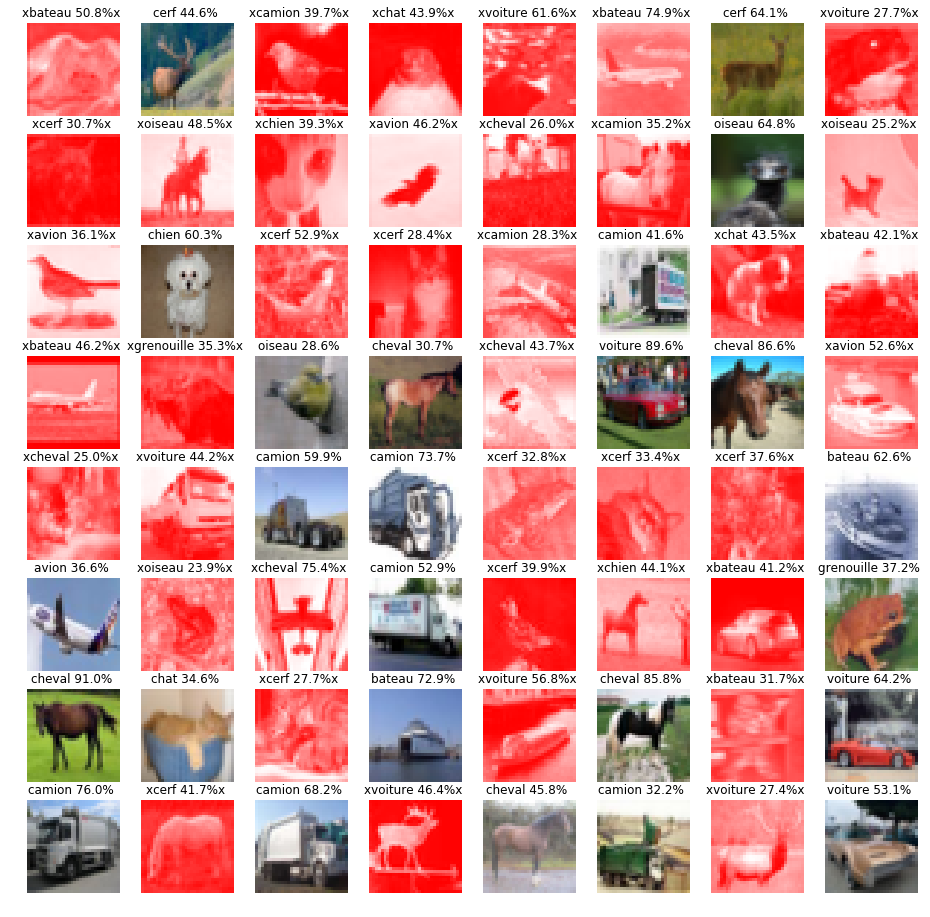
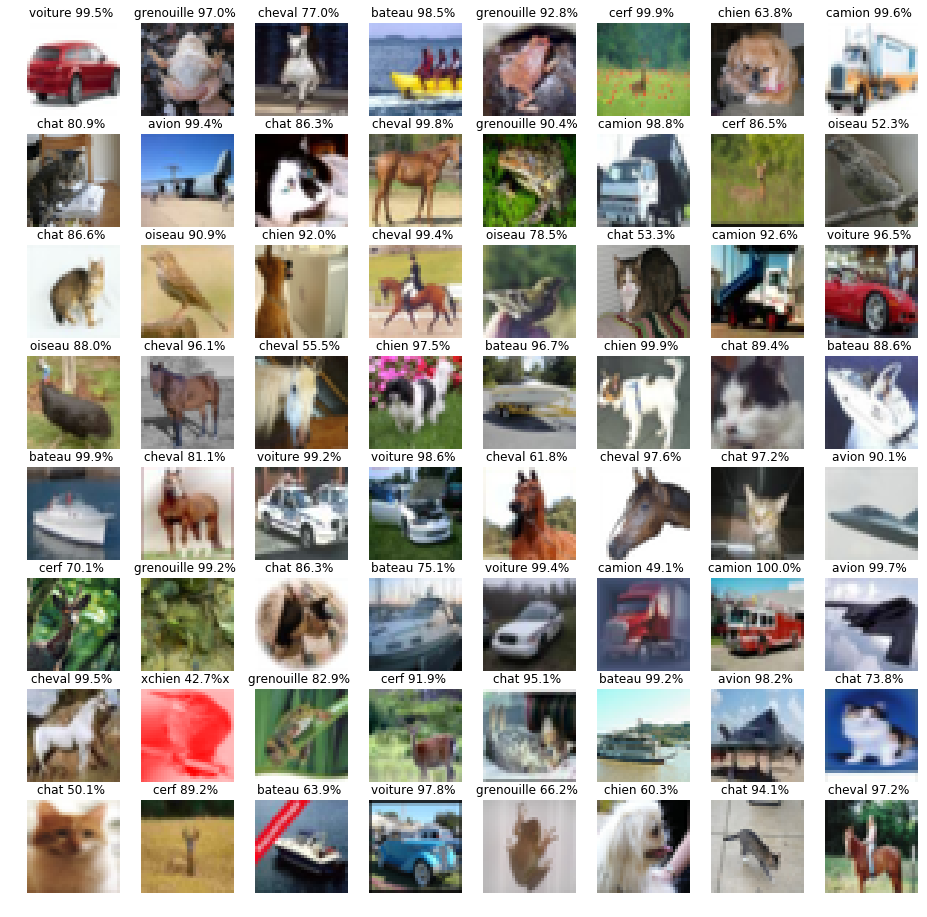
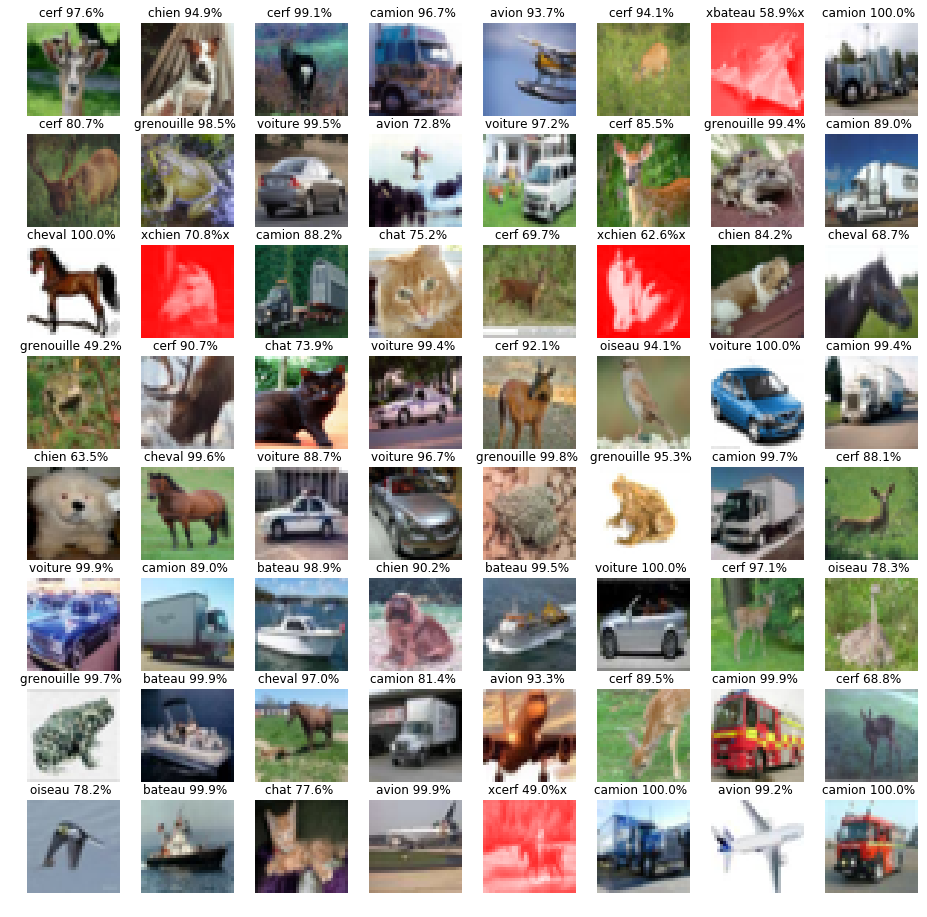
test_model(model=model)
Test le réseau sur des données test qui n'on jamais été observé par le réseau
Accuracy: 100.00%
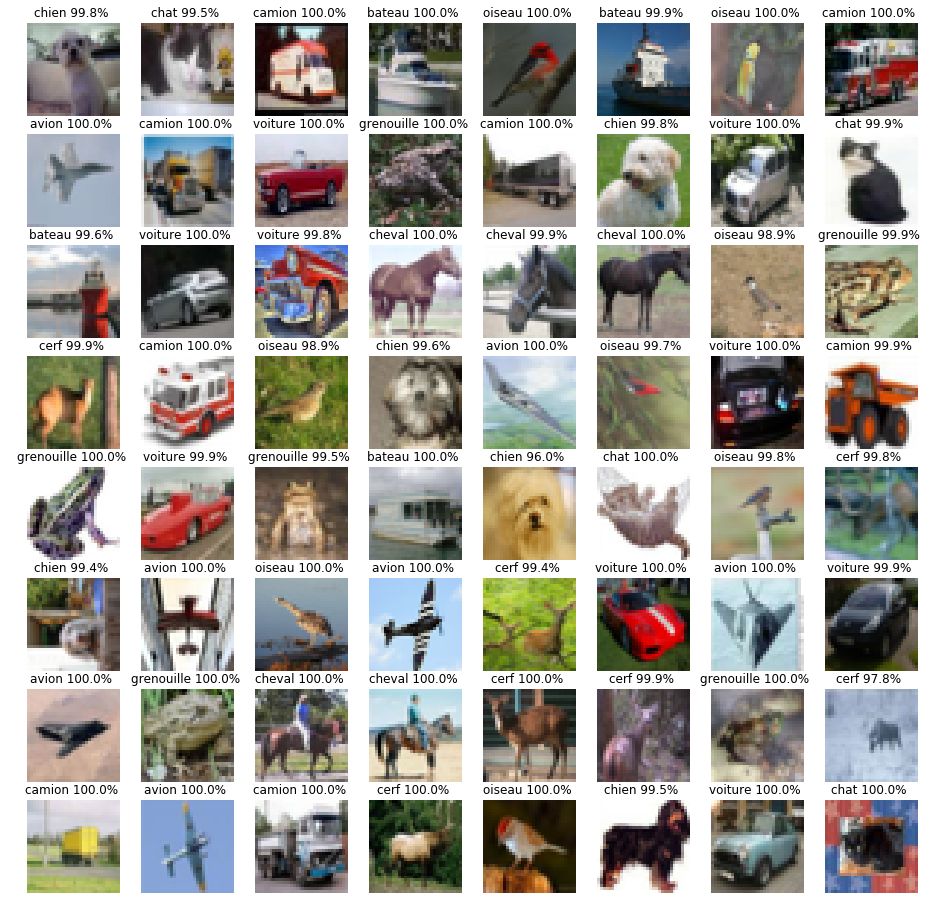
Accuracy: 100.00%
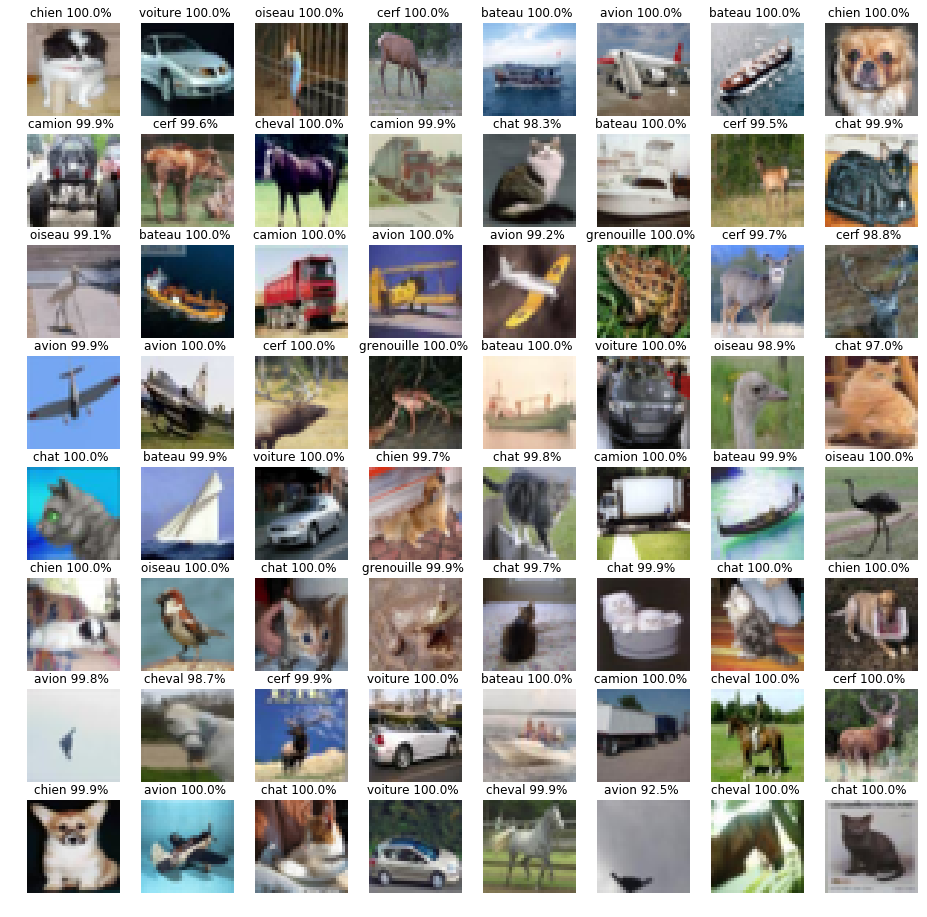
Accuracy: 100.00%
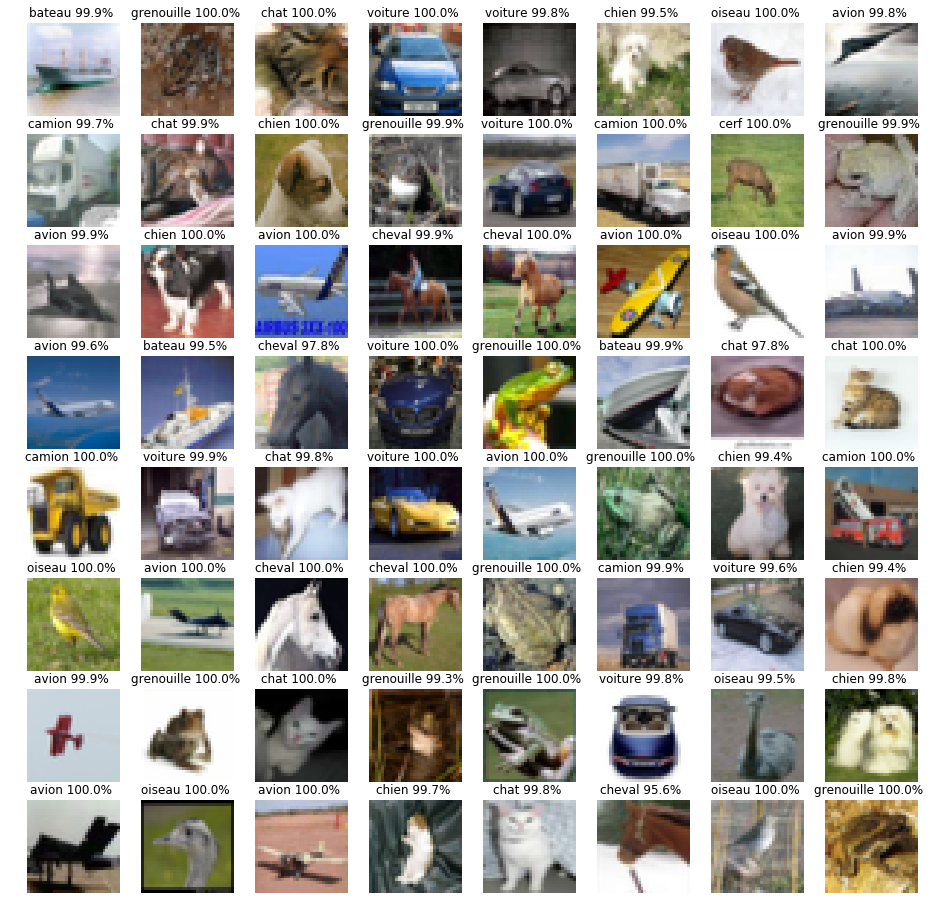
Accuracy: 100.00%
Accuracy: 100.00%
Accuracy: 100.00%
Address
Lycée Adolphe CheriouxVitry sur Seine, 94400
France